№ 98334-26
2026


Системы измерительные программно-технические «Азимут 5» (далее — Системы) предназначены для измерений в автоматическом режиме скорости движения транспортных средств (далее — ТС) в зоне контроля радиолокационным методом или по видеокадрам, скорости движения ТС на контролируемом участке; значений текущего времени, синхронизированного с национальной шкалой времени UTC(SU); временных интервалов; расстояния от Системы до ТС; измерений текущих навигационных параметров и определения на их основе координат Систем и автоматической фотовидеофиксации ТС.
Системы измерительные программно-технические «Азимут 5» (далее — Системы) предназначены для измерений в автоматическом режиме скорости движения транспортных средств (далее — ТС) в зоне контроля радиолокационным методом или по видеокадрам, скорости движения ТС на контролируемом участке; значений текущего времени, синхронизированного с национальной шкалой времени UTC(SU); временных интервалов; расстояния от Системы до ТС; измерений текущих навигационных параметров и определения на их основе координат Систем и автоматической фотовидеофиксации ТС.
Принцип действия Систем при измерении скорости движения ТС по видеокадрам основан на автоматическом измерении расстояния, пройденного ТС, и интервала времени, за которое это расстояние пройдено, без необходимости предварительной градуировки плоскости проезжей части в стационарном варианте размещения.
Принцип действия Систем при измерении скорости движения ТС радиолокационным методом основан на измерении разности частоты высокочастотных сигналов радиолокационного модуля при отражении от движущихся ТС и от неподвижных объектов (эффект Доплера), при:
— стационарном (предназначены для обеспечения контроля за дорожным движением в режиме непрерывной работы, являются элементами обустройства автомобильных дорог и размещаются стационарно на стойках, опорах и других конструкциях);
— передвижном (предназначены для обеспечения контроля за дорожным движением в режиме непрерывной работы в течение ограниченного промежутка времени, размещаются на специальных конструкциях (штативах, треногах и т.п., вышках на базе ТС);
— мобильном (предназначены для обеспечения контроля за дорожным движением в течение ограниченного промежутка времени и размещаются на борту ТС) вариантах размещения Систем.
Необходимость внеочередной поверки при изменении места расположения Систем или при изменении ракурса отсутствует как для радиолокационного метода измерения скорости, так и для метода измерения скорости по видеокадрам.
Принцип действия Систем при измерении скорости движения ТС на контролируемом участке основан на измерении расстояния, пройденного ТС от точки фиксации в зоне контроля на въезде до точки фиксации в зоне контроля на выезде с участка, а также измерения интервала времени между моментами фиксации ТС в зоне контроля на въезде и зоне контроля на выезде с контролируемого участка. Измерение скорости движения ТС на контролируемом участке может производиться как одной Системой, так и несколькими. При измерений одной Системой, в состав Системы должны входить не менее двух вычислительных модулей (с ТВДД типа 1 или типа 2) или двух моноблоков, либо их комбинация. При этом компоненты одной Системы или несколько Систем должны находиться в стационарном размещении (на стойках, опорах и других элементах обустройства автомобильных дорог).
Принцип действия Систем при измерении значений текущего времени и координат основан на параллельном приеме и обработке сигналов навигационных космических аппаратов космических навигационных систем ГЛОНАСС/GPS с помощью приемника, входящего в состав Системы, автоматической синхронизации шкалы времени Системы с национальной шкалой времени UTC(SU) и записи текущего момента времени и координат в сохраняемые фото- и видеокадры, формируемые Системой. При отсутствии возможности приёма сигналов навигационных космических аппаратов космических навигационных систем ГЛОНАСС/GPS, Системы имеют возможность синхронизации шкалы времени Системы с национальной шкалой времени UTC(SU) через NTP протокол.
Принцип действия Систем при измерении расстояния от Системы до ТС основан на вычислении расстояния до ТС путём математической обработки изображения ТС и их государственных регистрационных знаков.
Функционально Системы применяются для фиксации следующих событий:
— проезд ТС без совершения нарушения;
— превышение установленной скорости движения ТС;
— движение ТС в нарушение требований, предписанных дорожными знаками;
— движение ТС в нарушение требований, предписанных информационными табло;
— движение ТС в нарушение требований, предписанных дорожными знаками совместно (или без) со знаками дополнительной информации (таблички);
— выявление, фиксация приближающихся и удаляющихся ТС, двигающихся в плотном потоке во всей зоне контроля Системы, с формированием пакета данных и траектории движения (трекинг) по каждому ТС, с внесением координат установки Системы и времени фиксации ТС, с дальнейшей передачей в необходимые базы данных (аналитика и др.), а также выполнение оперативно-розыскных функций (угон, розыск и др.).
— пересечения в нарушение ПДД линий разметки проезжей части дороги;
— проезд на запрещающий сигнал светофора;
— невыполнение требования об остановке перед стоп-линией;
— невыполнение требования об остановке перед знаком стоп;
— выезда на перекресток или пересечение проезжей части дороги в случае образовавшегося затора (или нарушение правил пересечения перекрестков с «вафельной» разметкой);
— поворот или движение прямо или разворот в нарушение требований, предписанных дорожными знаками или разметкой проезжей части дороги;
— несоблюдение требований (предписанных дорожными знаками), запрещающими движение грузовых ТС;
— выезд в нарушение ПДД на обочину (газоны, пешеходные тротуары, велодорожки, полосы для реверсивного движения, полосы для движения маршрутных ТС, трамвайные пути);
— выезд в нарушение ПДД на полосу, предназначенную для встречного движения;
— нарушения правил пользования внешними световыми приборами;
— нарушения правил применения ремней безопасности или мотошлемов;
— несоблюдения требований, запрещающих остановку или стоянку ТС;
— нарушения правил пользования телефоном водителем ТС;
— движение ТС во встречном направлении по дороге с односторонним движением;
— нарушения требований об обязательном прохождении технического осмотра или обязательном страховании гражданской ответственности владельцев ТС;
— установка на ТС без соответствующего разрешения спецсигналов (или опознавательного фонаря такси, опознавательного знака «Инвалид» и т.п.);
— невыполнение требования ПДД уступить дорогу пешеходам (велосипедистам или иным участникам дорожного движения);
— нарушение скоростного режима на протяженном участке дороги;
— несоблюдение дистанции к впереди движущемуся ТС;
— выезда на железнодорожный переезд при закрытом или закрывающемся шлагбауме, либо при запрещающем сигнале светофора;
— остановка (стоянка) или выезд на встречную полосу на железнодорожном переезде;
— движение автомобиля с разрешенной массой ТС по полосам в нарушение ПДД;
— нарушение правил, установленных для движения ТС жилых зонах;
— движение ТС в нарушение требований, предписанных знаками переменной информации на соответствующих участках дорог (автомобильных дорог) с удаленной перенастройкой и синхронизацией с настройкой знака переменной информации;
— нарушение требований ПДД, превышение допустимого уровня шума выпуска двигателей ТС, который определяется сопряженным с Системами средствами измерения уровня шума ТС;
— нарушение требований ПДД, лицами использующих для передвижения средства индивидуальной мобильности (СИМ);
— нарушение правил перевозки опасных грузов;
— нарушение требований в области охраны окружающей среды;
— нарушение требований лесного законодательства об учете древесины и сделок с ней;
— нарушения требований в сфере благоустройства, связанные с размещением ТС на платных и бесплатных парковках, на зеленых насаждениях,
— нарушения требований пожарной безопасности об обеспечении проходов и проездов к зданиям и сооружениям;
— нарушения требований в области благоустройства территорий, предусмотренных законами (нормативно-правовыми актами) субъектов Российской Федерации, органов местного самоуправления;
— нарушения требований в области охраны окружающей среды, предусмотренных законами (нормативно-правовыми актами) субъектов Российской Федерации, органов местного самоуправления;
— движение задним ходом в запрещенных местах;
— движение задним ходом по автомагистрали;
— отсутствие лицензий такси, разрешения проезда по выделенной полосе для движения маршрутных ТС;
Состав событий, которые фиксируют Системы, определяется лицензионным файлом.
Алгоритм выявления и фиксации нарушений основан на перечисленных выше принципах действия и реализован за счет автоматического совмещения результатов измерений, распознанного ГРЗ ТС, фото- и видеоматериалов, а также, при необходимости, размеченных зон фиксации и месторасположения ТС на дорожном полотне, данных нейросетевой видеоаналитики, информации, полученной по запросам к внешним базам данных.
Фиксация событий осуществляется для приближающихся и удаляющихся ТС, двигающихся в плотном потоке во всей зоне контроля с формированием пакета данных и траектории движения (трекинг) по каждому ТС с внесением в пакет данных координат установки Систем и времени фиксации ТС.
Решение измерительных задач, определенных назначением Системы, производят в автоматическом режиме без участия человека.
В состав Систем могут входить в любой комбинации в зависимости от комплекта поставки:
Выносной распознающий (детализирующий) телевизионный датчик (ТВДД), в состав которого входит видеокамера высокого разрешения и инфракрасная (ИК) система освещения. ТВДД в зависимости от решаемых задач и формы исполнения подразделяются на три типа:
— тип 1 (ТВДД1) — используется для измерений скорости движения ТС, присвоения временной метки видеокадру;
— тип 2 (ТВДД2) — используется для измерений скорости движения ТС, присвоения временной метки видеокадру;
— тип 3 (ТВДД3) — используется для присвоения временной метки видеокадру.
Общие виды ТВДД представлены на рисунках 1 — 3.
Вычислительный модуль тип 1 (ВМ1) состоит из специализированного компьютера со встроенным специализированным программным обеспечением (ВСПО), приемной аппаратуры сигналов ГНСС ГЛОНАСС/GPS; используется для подключения ТВДД тип 1, тип 2, тип 3.
Вычислительный модуль тип 2 (ВМ2) состоит из специализированного компьютера со встроенным специализированным программным обеспечением (ВСПО), приемной аппаратуры сигналов ГНСС ГЛОНАСС/GPS; используется для подключения ТВДД тип 1, тип 2, тип 3.
Моноблок тип 1 (МБ1), включающий в себя специализированный компьютер с ВСПО, приемную аппаратуру сигналов ГНСС ГЛОНАСС/GPS, видеокамеру высокого разрешения и ИК систему освещения;
Моноблок тип 2 (МБ2), включающий в себя специализированный компьютер с ВСПО, приемную аппаратуру сигналов ГНСС ГЛОНАСС/GPS, видеокамеру высокого разрешения, ИК систему освещения и радиолокационный модуль. Измерение скорости движения ТС в зоне контроля моноблоком типа 2 может производиться одновременно как методом по видеокадрам, так и радиолокационным методом. В этом случае, только при совпадении с заданной погрешностью, измеренных значений скорости движения ТС, результат передается для дальнейшей обработки.
Моноблок тип 3 (МБ3) включающий в себя специализированный компьютер с ВСПО, приемную аппаратуру сигналов ГНСС ГЛОНАСС/GPS и видеокамеру высокого разрешения, в бронированном защитном кожухе, выдерживающим воздействие средств поражения по классам защиты Бр2, Бр1 и С1.
Моноблок тип 4 (МБ4) включающий в себя специализированный компьютер с ВСПО, приемную аппаратуру сигналов ГНСС ГЛОНАСС/GPS, видеокамеру высокого разрешения и радиолокационный модуль, в бронированном защитном кожухе, выдерживающим воздействие средств поражения по классам защиты Бр2, Бр1 и С1. Измерение скорости движения ТС в зоне контроля моноблоком типа 4 может производиться одновременно как методом по видеокадрам, так и радиолокационным методом. При этом только при совпадении, с заданной погрешностью, измеренных значений скорости движения ТС, результат передается для дальнейшей обработки.
Моноблок тип 5 (МБ5), включающий в себя специализированный компьютер с ВСПО, приемную аппаратуру сигналов ГНСС ГЛОНАСС/GPS, видеокамеру высокого разрешения;
Моноблок тип 6 (МБ6), включающий в себя специализированный компьютер с ВСПО, приемную аппаратуру сигналов ГНСС ГЛОНАСС/GPS, видеокамеру высокого разрешения и радиолокационный модуль. Измерение скорости движения ТС в зоне контроля моноблоком типа 6 может производиться одновременно как методом по видеокадрам, так и радиолокационным методом. В этом случае, только при совпадении с заданной погрешностью, измеренных значений скорости движения ТС, результат передается для дальнейшей обработки.
Моноблоки всех типов могут использоваться для подключения ТВДД2 и ТВДД3.
Вспомогательное оборудование, не влияющее на метрологические характеристики и выполняющее функции распределения питания и обеспечения связи между компонентами Системы и обеспечения связи с внешними информационными системами, включая программно-технические элементы защиты информации (аккумуляторные батареи, вводно-распределительное устройство (ВРУ), шкаф питания и связи (ШПС) и пр.); обеспечения полноты доказательной базы (обзорные ТВ датчики (ТВДО) и пр.); обеспечения фиксации и крепежа Системы и ее компонентов (устройства позиционирования, кронштейны, треноги, ручки и пр.), выполняющее сервисные функции (информационный дисплей, индикаторная панель, отображающие параметры состояния системы согласно Руководству по эксплуатации, бленда и пр.).
Компоненты Систем могут изготавливаться следующих цветов: белый, серый, серебристый, черный. В состав Системы должен входить как минимум один ВМ любого типа или один моноблок любого типа.
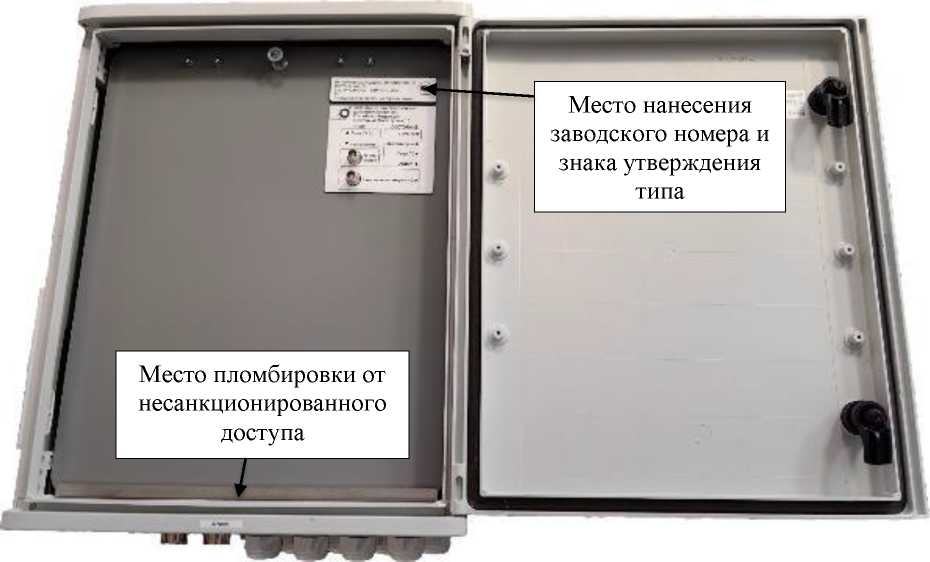
Общий вид компонентов Систем, схема пломбировки от несанкционированного доступа, места нанесения заводского номера и знака утверждения типа представлены на рисунках 4 — 13.
Системы соответствуют требованиям Технического регламента Таможенного союза «Электромагнитная совместимость технических средств» (ТР ТС 020/2011) и Технического регламента Таможенного союза «О безопасности низковольтного оборудования» (ТР ТС 004/2011).

Рисунок 1 — Общий вид ТВДД типа 1 (ТВДД1)

Рисунок 2 — Общий вид ТВДД типа 2 (ТВДД2)

Рисунок 3 — Общий вид ТВДД типа 3 (ТВДД3)
Место нанесения заводского номера и знака утверждения типа
Место пломбировки от несанкционированного доступа
Рисунок 4 — Общий вид вычислительного модуля тип 1 (ВМ1)
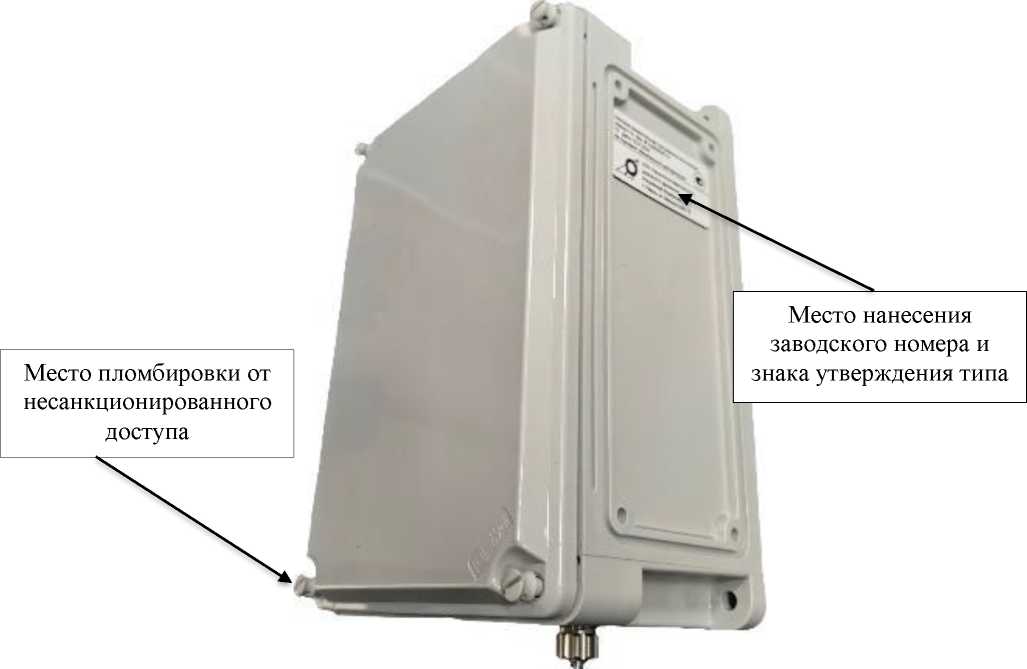
Рисунок 5 — Общий вид вычислительного модуля тип 2 (ВМ2)

Место пломбировки от несанкционированного доступа
Рисунок 6 — Общий вид моноблоков типов 1, 2 (МБ1, МБ2)
Место нанесения заводского номера и знака утверждения типа
Информационный дисплей (по согласованию)
Место пломбировки от несанкционированного доступа
Рисунок 7 — Место пломбировки моноблоков типов 1, 2 (МБ1, МБ2) от несанкционированного доступа, нанесения заводского номера и знака утверждения типа моноблоков

Рисунок 8 — Общий вид моноблоков типов 3, 4 (МБ3, МБ4)
Место пломбировки от несанкционированного доступа

Рисунок 9 — Места пломбировки от несанкционированного доступа, нанесения заводского номера и знака утверждения типа моноблоков типов 3, 4 (МБ3, МБ4)
Место нанесения заводского номера и знака утверждения типа
Место нанесения заводского номера и знака утверждения типа

Рисунок 10 — Общий вид моноблоков типа 5 (МБ5)
Место пломбировки от несанкционированного доступа
Рисунок 11 — Места пломбировки от несанкционированного доступа, нанесения заводского номера и знака утверждения типа моноблоков типа 5 (МБ5)

Рисунок 12 — Общий вид моноблоков типа 6 (МБ6)
Место нанесения заводского номера и знака утверждения типа

Место пломбировки от несанкционированного доступа
Рисунок 13 — Места пломбировки от несанкционированного доступа, нанесения заводского номера и знака утверждения типа моноблоков типа 6 (МБ6)
Допустимые варианты размещения компонентов Систем указаны в таблице 1.
Таблица 1
| Вариант размещения | ВМ1 | ВМ2 | ТВДД1 | ТВДД2 | ТВДД3 | МБ1 | МБ2 | МБ3 | МБ4 | МБ5 | МБ6 |
| Стационарный | + | + | + | + | + | + | + | + | + | + | + |
| Передвижной | + | + | |||||||||
| Мобильный | + | + |
Перечень измерительных задач, решаемых компонентами Систем представлен в таблице 2.
Таблица 2
| Измеряемая величина | ВМ1 | ВМ 2 | ТВДД1 | ТВДД2 | ТВДД3 | МБ1 | МБ2 | МБ3 | МБ4 | МБ5 | МБ6 |
| Скорость движения ТС в зоне контроля по видеокадрам | + | + | + | + | — | + | — | + | — | + | — |
| Скорость движения ТС в зоне контроля радиолокационным методом | — | — | — | — | — | — | + | — | + | — | + |
| Скорость движения ТС на контролируемом участке | + | + | + | + | — | + | + | + | + | + | + |
| Синхронизация с UTC(SU) по сигналам ГНСС | + | + | — | — | — | + | + | + | + | + | + |
| Синхронизация с UTC(SU) через NTP протокол | + | + | — | — | — | + | + | + | + | + | + |
Продолжение таблицы 2
| Измеряемая величина | ВМ1 | ВМ 2 | ТВДД1 | ТВДД2 | ТВДД3 | МБ1 | МБ2 | МБ3 | МБ4 | МБ5 | МБ6 |
| Присвоение метки времени кадру | + | + | + | + | + | + | + | + | + | + | + |
| Измерение интервала времени | + | + | + | + | + | + | + | + | + | + | + |
| Определение координат в плане в статике | + | + | — | — | — | + | + | + | + | + | + |
| Определение координат в плане в динамике | — | — | — | — | — | — | + | — | — | — | + |
| Измерение расстояния до ТС | + | + | + | + | + | + | + | + | + | + | + |
Знак поверки на Системы не наносится.
Заводской номер наносится на прямоугольную самоклеящуюся этикетку, изготовленную типографским способом и размещаемую либо на внутренней части вычислительного модуля тип 1, либо на боковой части вычислительного модуля тип 2, либо на задней панели моноблоков типов 1, 2, 3 и 4, либо на боковой части моноблоков типов 5 и 6. Формат нанесения заводского номера буквенно-цифровой.
Состав Системы с указанием компонентов, входящих в нее, указывается в паспорте на Систему.
Пример оформления этикетки с заводским номером приведен на рисунке 14.

Системы измерительные программно-технические «Азимут 5» Зав. № AZ5000001 дата 15.07.2025
ТУ 26.51.66-007-24066729-24

ООО «Технологии безопасности дорожного движения Российская Федерация, г Пермь, ул. Маршрутная, 15
Рисунок 14 — Пример оформления этикетки
Функционирование Систем осуществляется под управлением специализированного программного обеспечения (ПО).
Влияние ПО на метрологические характеристики учтено при нормировании метрологических характеристик.
Уровень защиты ПО «высокий» в соответствии с Р 50.2.077-2014.
Таблица 3 — Идентификационные данные ПО
| Идентификационные данные (признаки) | Значение |
| Идентификационное наименование ПО | Азимут 5 |
| Номер версии (идентификационный номер) ПО | не ниже 5.0.0 |
| Цифровой идентификатор ПО | — |
Таблица 4 — Метрологические характеристики
| Наименование характеристики | Значение |
| Диапазон измерений скорости движения ТС, км/ч:
— при измерении по видеокадрам в зоне контроля в стационарном варианте размещения (ВМ1, ВМ2, ТВДД1, ТВДД2, МБ1, МБ3, МБ5) — при измерении радиолокационным методом в зоне контроля в стационарном варианте размещения (МБ2, МБ4, МБ6), в передвижном и мобильном* варианте размещения (МБ2, МБ6) — при измерении на контролируемом участке в стационарном варианте размещения (все кроме ТВДД3) |
от 0 до 350 включ.
от 0 до 350 включ. от 0 до 350 включ. |
| Пределы допускаемой абсолютной погрешности измерений скорости движения ТС в диапазоне скоростей от 0 до 350 км/ч включ., км/ч:
а) при измерении по видеокадрам в зоне контроля в стационарном варианте размещения (ВМ1, ВМ2, ТВДД1, МБ1, МБ3, МБ5) б) при измерении радиолокационным методом в зоне контроля в стационарном варианте размещения (МБ2, МБ4, МБ6), в передвижном и мобильном* варианте размещения (МБ2, МБ6) в) при измерении на контролируемом участке в стационарном варианте размещения (все кроме ТВДД3) Пределы допускаемой погрешности измерений скорости движения ТС при измерении по видеокадрам в зоне контроля в стационарном варианте размещения (ТВДД2): — абсолютной в диапазоне от 0 до 100 км/ч включ., км/ч — относительной в диапазоне св. 100 км/ч до 350 км/ч включ., % Пределы допускаемой инструментальной погрешности измерений скорости движения ТС в диапазоне скоростей от 0 до 350 км/ч включ. при измерении радиолокационным методом в зоне контроля в стационарном варианте размещения (МБ2, МБ4, МБ6), в передвижном и мобильном* варианте размещения (МБ2, МБ6), км/ч |
±1
±1 ±1 ±2 ±2 ±0,2 |
| Пределы допускаемой абсолютной погрешности формирования шкалы времени относительно национальной шкалы времени UTC(SU) в режиме синхронизации по сигналам ГНСС ГЛОНАСС, нс | ±200 |
| Пределы допускаемой абсолютной погрешности формирования шкалы времени относительно национальной шкалы времени UTC(SU) в режиме синхронизации по протоколу NTP, мс | ±200 |
| Пределы допускаемой абсолютной погрешности присвоения временной метки видеокадру Систем относительно национальной шкалой времени UTC(SU) в режиме синхронизации по сигналам ГНСС ГЛОНАСС, мс: — ТВДД2, ТВДД3
— ВМ1, ВМ2, ТВДД1, МБ1, МБ2, МБ3, МБ4, МБ5, МБ6 |
±50 ±1 |
| Пределы допускаемой абсолютной погрешности присвоения временной метки видеокадру Систем относительно национальной шкалой времени
UTC(SU) в режиме синхронизации по протоколу NTP, мс |
±200 |
П Продолжение таблицы 4
| Наименование характеристики | Значение |
| Границы допускаемой абсолютной инструментальной погрешности (по уровню вероятности 0,95) определения координат Систем в плане**, м:
— при стационарном (ВМ1, ВМ2, МБ1 — МБ6) или передвижном (МБ2, МБ6) варианте размещения Систем — при мобильном варианте размещения Систем в диапазоне скоростей от 0 до 150 км/ч (МБ2, МБ6) |
±3
±3 |
| Диапазон измерений интервалов времени, c | от 1 до 86400 |
| Пределы допускаемой абсолютной погрешности измерений интервалов времени, с | ±1 |
| Диапазон измерений расстояния от ТВДД или моноблоков до ТС, м | от 1 до 110 |
| Пределы допускаемой абсолютной погрешности измерений расстояния от ТВДД или моноблоков до ТС, м | ±0,15 |
| * — максимальное значение скорости сближения при измерении скорости движения ТС в движении — 350 км/ч
* * — метрологическая характеристика определена по сигналам от спутников GPS и ГЛОНАСС, принимаемых одновременно, при значениях PDOP < 3 |
|
Таблица 5 — Технические характеристики
| Наименование характеристики | Значение |
| Минимальная протяженность контролируемого участка, м | 70 |
| Габаритные размеры без крепежных, установочных, съемных элементов | |
| и блоков питания, мм, не более: | |
| а) ВМ1 | |
| — длина | 210 |
| — ширина | 430 |
| — высота | 530 |
| б) ВМ2 | |
| — длина | 168 |
| — ширина | 201 |
| — высота | 325 |
| в) МБ1, МБ2 | |
| — длина | 270 |
| — ширина | 225 |
| — высота | 165 |
| г) МБ3, МБ4 | |
| — длина | 450 |
| — ширина | 265 |
| — высота | 254 |
| д) МБ5, МБ6 | |
| — длина | 496 |
| — ширина | 144 |
| — высота | 210 |
| е) ТВДД1 | |
| — длина | 410 |
| — ширина | 150 |
| — высота | 140 |
| ж) ТВДД 2 | |
| — длина | 430 |
| — ширина | 120 |
| — высота | 140 |
| з) ТВДД3
— диаметр — высота |
190
332 |
| Масса без крепежных, установочных, съемных элементов и блоков | |
| питания, кг, не более: | |
| — ВМ1 | 14,5 |
| — ВМ2 | 3,4 |
| — МБ1, МБ2 | 4,8 |
| — МБ3, МБ4 | 35,0 |
| — МБ5, МБ6 | 4,8 |
| -ТВДД1 | 2,9 |
| -ТВДД2 | 3,2 |
| -ТВДД3 | 4,7 |
| Условия применения: | |
| — температура окружающей среды, °С: | от -70 до +70 |
| — относительная влажность воздуха при +30 °С, % | до 95 |
| — относительная влажность воздуха при +25 °С, % | до 98 |
наносится на прямоугольную самоклеящуюся этикетку, изготовленную типографским способом и размещаемую либо на внутренней части вычислительного модуля тип 1 Систем, либо на боковой части вычислительного модуля тип 2, либо на задней панели моноблоков типов 1, 2, 3 и 4, либо на боковой части моноблоков типов 5 и 6 и на титульные листы паспорта и руководства по эксплуатации методом печати.
Таблица 6 — Комплектность Систем
| Наименование | Обозначение | Количество |
| Системы измерительные программно
технические в составе: |
«Азимут 5» | 1 к-т |
| Вычислительный модуль тип 1 | ВМ1 | по заказу* |
| Вычислительный модуль тип 2 | ВМ2 | по заказу* |
| ТВ датчик детализирующий тип 1 | ТВДД1 | по заказу* |
| ТВ датчик детализирующий тип 2 | ТВДД2 | по заказу* |
| ТВ датчик детализирующий тип 3 | ТВДД3 | по заказу* |
| Моноблок тип 1 | МБ1 | по заказу* |
| Моноблок тип 2 | МБ2 | по заказу* |
| Моноблок тип 3 | МБ3 | по заказу* |
| Моноблок тип 4 | МБ4 | по заказу* |
| Моноблок тип 5 | МБ5 | по заказу* |
| Моноблок тип 6 | МБ6 | по заказу* |
| Вспомогательное оборудование | _ | по заказу* |
| Руководство по эксплуатации | ТБДД 466534.060 РЭ | 1 экз.** |
| Руководство оператора | ТБДД.466534.060 РО1 | 1 экз.** |
| Паспорт | ТБДД.466534.060 ПС | 1 экз. |
| Методика поверки | _ | 1 экз.** |
| * — сведения о комплектности Системы, в том числе полный состав вспомогательного оборудования, указываются в паспорте.
* * — документы поставляются на цифровом носителе |
||
приведены в п 1.5.1 «Работа изделия» документа ТБДД 466534.060 РЭ «Системы измерительные программно-технические «Азимут 5. Руководство по эксплуатации».
Постановление Правительства РФ от 16.11.2020 № 1847 «Об утверждении перечня измерений, относящихся к сфере государственного регулирования обеспечения единства измерений» в части пп. 12.1.1, 12.1.2, 12.42.1, 12.42.2, 12.43;
ГОСТ Р 57144-2016 «Специальные технические средства, работающие в автоматическом режиме и имеющие функции фото- и киносъемки, видеозаписи, для обеспечения контроля за дорожным движением. Общие технические требования» в части пп. 5.3, 5.4, 5.5;
Системы измерительные программно-технические «Азимут 5» Технические условия. ТУ 26.51.66-007-24066729-24.